
唐山东菱伺服ABR142-9-S2-P2性能
行星减速机在设计时要考虑以下要求:
一、行星减速机设计时原始资料和数据。例如:原电机的类型、规格、转速、工作机械的类型等等。
二、初定各项工艺方法及参数。
三、选定行星减速机的类型和安装形式。
四、初定计算齿轮中心距的模数及几何参数。
五、确定传动级数。依照总传动比,确定传动的级数和各级传动比。
六、整体方案设计,要确定行星减速机的结构、轴的尺寸、轴承型号等等。
七、要确定齿轮渗碳深度。
八、要确定行星减速机的附件。
九、冷却润滑的计算。
十、要选定行星减速机的类型和安装方式。

6I6P-1
6R6PV-1
6R6PV-2E
6I6S-1
6R6SV-1
6I6P-2E
6R6SV-2E
6I6S-2E
6R6P-1
6I6PV-1
6R6P-2E
6I6PV-2E
6R6S-1
6I6SV-1
6R6S-2E
6I6SV-2E
8I25P-1
8I25PV-1
8I25P-2E
8I25PV-2E
8I25P-3E
8I25SV-1
8I25S-1
8I25SV-2E
8I25S-2E
8R25PV-1
8I25S-3E
8R25PV-2E
8R25P-1
8R25SV-1
8R25P-2E
8R25SV-2E
8R25S-1
9I40PV-1
8R25S-2E
9I40PV-2E
9I40P-1
9I40SV-1
9I40P-2E
9I40SV-2E
9I40P-3E
9R40PV-1
9I40P-8E
9R40PV-2E
9I40S-1
9R40SV-1
9I40S-2E
9R40SV-2E
9I40S-3E
9I60PV-1
9I40S-8E
9I60PV-2E
9R40P-1
9I60SV-1
9R40P-2E
9I60SV-2E
9R40S-1
9I90PV-1
9R40S-2E
9I90PV-2E
9I60P-1
9I90SV-1
9I60P-2E
9I90SV-2E
9I60P-3E
9R60PV-1
9I60P-8E
9R60PV-2E
9I60S-1
9R60SV-1
9I60S-2E
9R60SV-2E
9I60S-3E
9R90PV-1
9R60P-1
9R90SV-1
9I60S-8E
9R90PV-2E
9R60P-2E
9R90SV-2E
9R60S-1
9R60S-2E
6T3P-1
9I90P-1
6T3P-2E
9I90P-2E
6T3S-1
9I90P-3E
6T3S-2E
9I90P-8E
8T10P-1
9I90S-1
8T10P-2E
9I90S-2E
8T10S-1
9I90S-3E
8T10S-2E
9I90S-8E
9T20P-1
9T20P-2E
9T20S-1
9R90P-1
9T20S-2E
9R90P-2E
9T40P-1
9R90P-3E
9T40P-2E
9R90S-1
9T40S-1
9R90S-2E
9T40S-2E
6I6PU-1
8I25PB-2E
6I6PU-2E
8R25PB-2E
6I6SU-1
9I40PB-2E
6I6SU-2E
9I40SB-2E
6R6PU-1
9I60PB-2E
6R6PU-2E
9I60PB-3E
6R6SU-1
9I90PB-8E
6R6SU-2E
9I90PB-3E
8I25PU-1
9I90PB-2E
8I25PU-2E
9I90PB-8ME
8I25SU-1
8I25SU-2E
8R25PU-1
8R25PU-2E
8R25SU-1
8R25SU-2E
9I40PU-1
9I40PU-2E
9I40SU-1
9I40SU-2E
9R40PU-1
9R40PU-2E
9R40SU-1
9R40SU-2E
9I60PU-1
9I60SU-1
9I60SU-2E
9I60PU-2E
9R60PU-1
9R60PU-2E
9R60SU-1
9R60SU-2E
9I90PU-1
9I90PU-2E
9I90SU-1
9I90SU-2E
9R90PU-1
9R90PU-2E
9R90SU-1
9R90SU-2E
8I25P-3M
8I25S-3M
8R25P-1M
8R25P-2M
8R25S-1M
8R25S-2ME
9I40P-3ME
9I40S-3ME
9R40P-1M
9R40P-2ME
9R40S-2ME
9I60P-3ME
9I60S-3ME
9R60P-1M
9R60P-2ME
9R60S-1M
9R60S-2ME
6R6P-1M
6R6P-2ME
6R6S-1M
9I90P-3ME
9I90S-3ME
6R6S-2ME
9R90P-1M
9R90P-2ME
9R90S-1M
9R90S-2ME
9R135S-2ME
9R135P-2ME
9I135S-3ME
9I135P-3ME
9I135S-2E
9I135P-2E
9R135S-2E
9R135P-2E
9I135PV-2E
9R135PV-2E
9I135SV-2E
9R135SV-2E
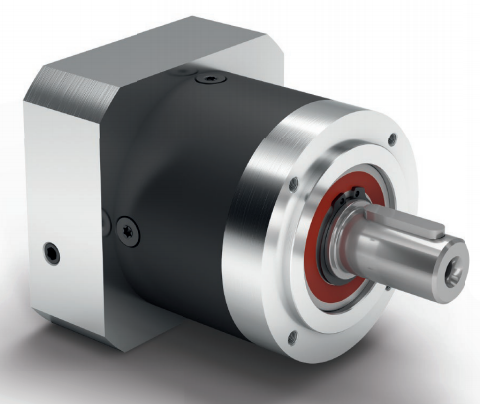
众所周知,一台机器通常是由三个基本部分组成:即动力机、行星减速机和工作机构。有时根据机器工作需要,可能还有控制系统和润滑、照明等辅助系统。行星减速机是指将动力机产生的机械能以机械的方式传送到工作机构上去的中间装置。
行星减速机在其中起到的作用是,降速同时提高输出扭矩,扭矩输出比例按电机输出乘减速比,但要注意不能超出行星减速机额定扭矩。
另外,减速还降低了负载的惯量,惯量的减少为减速比的平方,其实大家都可以看一下,一般电机都会有一个惯量数值的。
与滑轮相配套的轨道对于滑动门的使用也是至关重要的,滑动门用的轨道一般有冷轧钢轨道和铝合金轨道两种。消费者一般可能认为钢轨比铝合金轨道结实耐用,轨道的壁厚越厚越好,其实并不尽然。高质量的滑动门五金体现在轨道与滑轮的结合,而不是单纯的某个部分。轨道必须具有与滑轮配合完弧度,其次才是材料的问题。一般来说,进口的材料应优于国产的材料。消费者应该知道,任何产品做出相同的形状并不难,难的是貌似而神不离。
唐山东菱伺服ABR142-9-S2-P2性能

一直以来,我国机器人市场都备受外界关注,这几年异常突显,形式各样的机器人涌现在我们身边,让我们从,刚开始提及机器人是一个遥不可及的美好心愿而已,到如今,机器人已经是一个很大众化的知识产业,走进餐厅有服务机器人,走进办公室有程序机器人,走进展厅有主持机器人等等。 但是有多少人知道,了解机器人的零部件其中重要的就属减速机了。
当前,我国机器人市场的异军突起,并不能掩盖我国机器人领域的小而散现状,也并不意味着我国机器人产业的崛起。一方面,我们机器人产业发展正在陷入误区,另一方面,我们对机器人产业的未来趋势并没有引起足够关注和布局。
现下,我国传统机器人领域即将面临转型升级的巨大压力,机器人产业2.0时代即将来临。在传统机器人产业,我们不可能在短期内实现超越。在伺服电机、控制器和减速器等核心零部件领域,我们也不可能很快实现自主化。那么,我国机器人产业发展的机遇何在?
在机器人三大关键零部件中的控制系统、伺服电机实现了从无到有。但要从有到优,占领中高端市场,还需要在提高下游应用领域即系统集成上加大力度。为此,未来部分公司或以提高下游市场占有率为并购目标。
控制器和伺服电机有些技术瓶颈还没有突破,这导致机器人速度不快、急停不行、寿命不长,难以进入汽车制造等中市场。因此,也导致了机器人在低档市场竞争激烈,经济效益难以释放。此外,机器人企业对下游市场占有率不够重视,在零部件产品开发方向上有点偏。企业应该先做大机器人下游系统集成市场,再往上游做好零部件开发,提高国产化。
目前我国减速机行业还是一片蓝海。全球范围内机器人将会越来越普及,对于减速机行业来说,又是一个机遇又是一个挑战,相信未来的前景十分看好。
唐山东菱伺服ABR142-9-S2-P2性能
